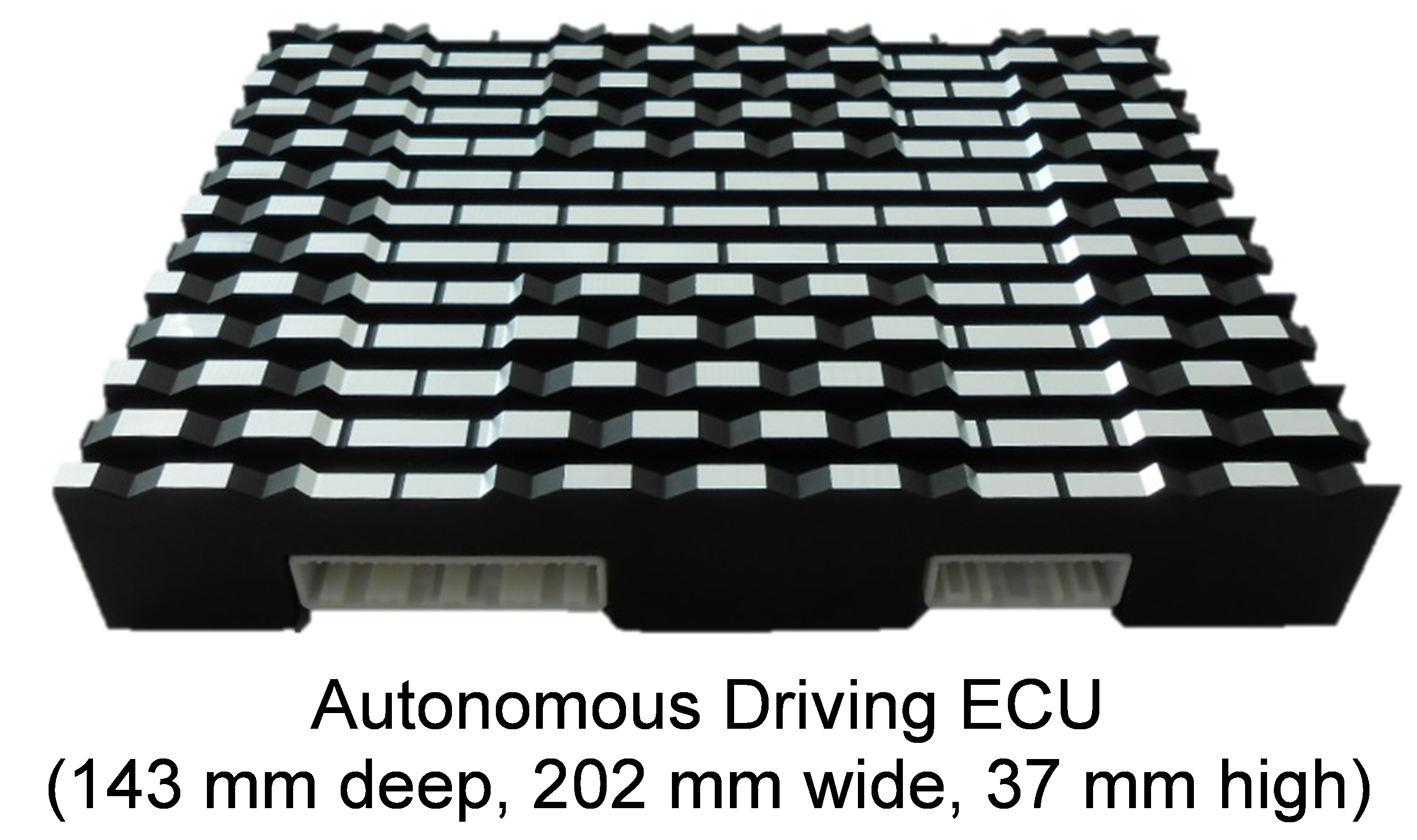
Demonstrated Test Driving with an Autonomous Driving ECU Equipped with Eleven Advanced Driving Applications Including Low-speed Adaptive Cruise Control (Traffic Jam Assist)
Tokyo, December 26, 2016 --- Hitachi Automotive Systems, Ltd. today announced that it had equipped a vehicle with an autonomous driving ECU (Electronic Control Unit) that has 11 advanced driving functions including low-speed adaptive cruise control (traffic jam pilot), and drove the vehicle on the company’s Tokachi Test Course, demonstrating that all functions worked correctly. The feedback obtained from this demonstration will be used to make further improvements aimed at starting sales of the autonomous driving ECU in July, 2017.
To achieve autonomous driving on highways, the ECU has to control various functions such as adaptive cruise control (ACC) and the lane keeping assist system (LKS). Hitachi Automotive Systems had previously demonstrated the functioning of an autonomous driving ECU equipped with eight applications.
Now, to assist with driving in congested traffic on highways, the Company has developed low-speed traffic jam assist (TJA) that keeps track of the low-speed vehicle ahead, low speed car passing (LSP) assist, and auto lane changing (ALC) applications that function under the control of the ECU. A vehicle equipped with an autonomous driving ECU provided with all these functions was then tested on the company’s Tokachi Test Course, which demonstrated that all functions worked correctly.
The autonomous driving ECU developed by Hitachi Automotive Systems incorporates a database capable of real-time high-speed data processing and management, providing the high-speed processing required by autonomous driving systems. Currently prototype ECUs are undergoing repetitive demonstration testing with the aim of starting sales of the product in July, 2017.
Hitachi Automotive Systems will continue to contribute to the development and dissemination of vehicles equipped with advanced safe driving technology by vehicle manufacturers.
List of applications developed by Hitachi Automotive Systems for autonomous driving ECUs
|
Development period |
Application |
Outline |
|
Fiscal 2016 |
Traffic Jam Assist (TJA) |
A low-speed adaptive cruise control function for congested highway conditions. The ability to keep track of the vehicle ahead makes it possible to drive autonomously around a highway tollgate where there is no highway lines. |
|
Low Speed Car Passing (LSP) |
A function for automatically overtaking a slow leading car during adaptive cruise control operation. On a highway, when it is recognized that the vehicle in front is traveling at a speed below that set on the tracking vehicle, the tracking vehicle overtakes it and automatically returns to the original lane when it confirms that it is safe to do so. |
|
|
Auto Lane Changing (ALC) |
A function for automatically changing lanes based on map information. When traveling on a highway and the system acquires lane change and branching information from the map data, it compares it to the lane it is traveling in and changes lane automatically. |
|
|
Fiscal 2015 |
Driver Triggered Auto Lane Changing (DT-ALC) |
When driving on a highway, a function to automatically change lane in accordance with a direction indicator input from the driver. When the direction indicator is input, the system changes lane after the surrounding safety is confirmed by the system sensors. If other vehicle(s) (obstacle) is/are detected around the vehicle, indicating a lane change would not be safe, the lane change is not carried out and the driver is informed that the lane change is not possible. |
|
Intelligent Speed Adaption (ISA) |
A function whereby speed signs on highways are recognized by a stereo camera mounted on the vehicle and the vehicle speed is automatically increased or decreased. If the vehicle is traveling below a posted speed sign, the speed is increased to the limit. If the camera detects that a speed sign ahead indicates a speed that is lower than the vehicle is traveling, the speed is adjusted so that it is within the speed limit by the time the vehicle reaches the speed sign. |
|
|
Highway Pilot (HWP) |
A function whereby the ACC and LKS cooperate to keep the vehicle traveling in the same lane on a highway. |
|
|
Up to fiscal 2014 |
Blind Spot Warning System (BSW) |
With this function, a vehicle (obstacle) in a blind spot to the rear is detected by the rear radar and the driver is informed. |
|
Semi-Auto Parking (SAP) |
After a parking space is specified, the system performs parking automatically except for the shift operation. |
|
|
Lane Keeping Assist System (LKS) |
When traveling on a highway, this function uses the stereo camera to recognize the highway lines and controls the steering to keep the vehicle in the lane. |
|
|
Autonomous Emergency Braking (AEB) |
With this function, the stereo camera recognizes obstacles ahead, sounds an alarm to notify the driver, and controls the brakes to slow and stop the vehicle when there is a danger of a collision. |
|
|
Adaptive Cruise Control (ACC) |
When traveling on a highway, this function keeps the vehicle traveling at a set speed while maintaining a constant distance from the vehicle in front. |